
ジュニア会員向けページ

1. はじめに
本記事ではRaspberry Pi という小形コンピュータとScratch というプログラミング環境を使ってモータを制御する方法を学ぶ.今回はScratch 上でのコードの書き方及び実験実施方法ついて学ぶ.
2. Scratch 上でのコードの書き方
(1)セットアップ編(No.63)でOS のインストールに続いて,Scratch のインストールについても説明した.今回Scratch のプログラミングは(2)ロボット組立編(No.64)でブレッドボードの電子回路に接続したRaspberry Pi Zero WH 本体を一旦ロボットから外し,図1 のようにAC アダプタ,液晶ディスプレイ,USB キーボード,及びUSB マウスを接続した状態でコードを書く.つまり図1 のように(1)セットアップ編の状態に一度戻して行う.
Scratch を起動すると図2 のような起動画面が現れる.図3 のように「編集」タブから「GPIO サーバを開始」を選択する.図4 のように左のコマンドウィンドウで「制御」をクリックし,現れたコマンド一覧の中から「スペースキーが押されたとき」をマウスでドラッグ………
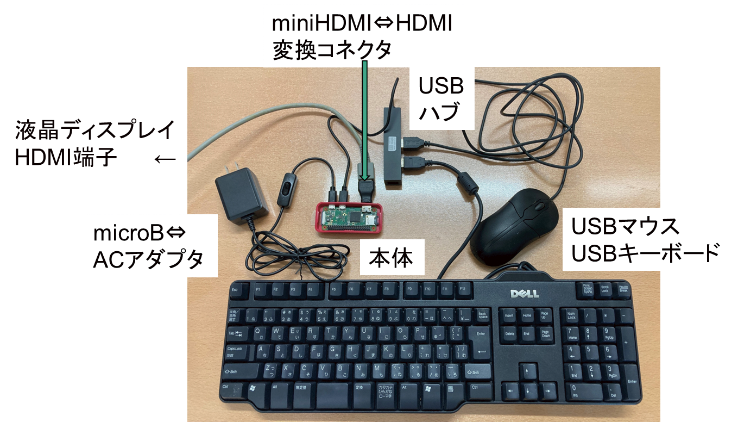
図1 インタフェースの接続
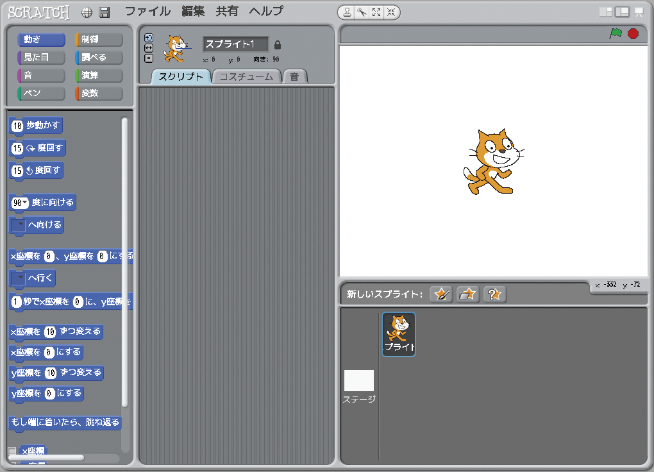
図2 Scratch の起動画面
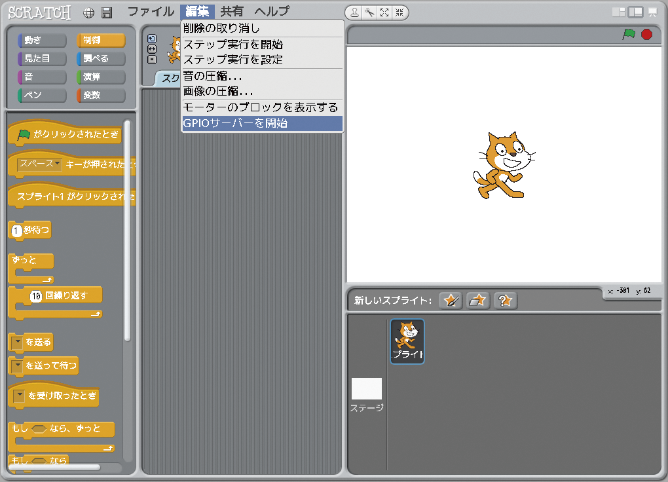
図3 GPIO サーバの起動
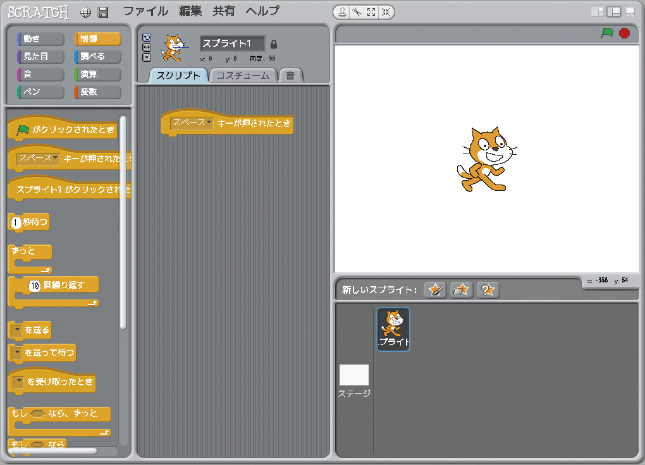
図4 Scratch のプログラミング